
Последние отчеты о рыбалке
-
 В полночь вселенная пахнет звездами
В полночь вселенная пахнет звездамиХА_Сергеич - 29 апр 2025 13:46
-
 Lucky loser в отборке, как это работает...
Lucky loser в отборке, как это работает...djadka - 02 мар 2025 21:25
-
Самый "дорогой" сезон!
djadka - 01 мар 2025 00:03
-

-
 Середчиха
Середчихавиктор васильевич - 03 дек 2024 19:16
-
Осенняя пора
Иван Кошкин - 24 сен 2024 20:59
-
 Щучки к 1 сентября
Щучки к 1 сентябряNik(дядьКоля) - 02 сен 2024 11:53
-
Неделю спустя
Иван Кошкин - 05 авг 2024 11:38
-
Хороший летний день на реке
Иван Кошкин - 29 июл 2024 11:26
-
 Утро на вытеке.
Утро на вытеке.Андрей Калачев - 23 июн 2024 20:06
Последнее видео
-
 Ловля хариуса способом кейрю
Ловля хариуса способом кейрюSergeiL - 20 апр 2023 12:22
-
 Рыбалка на Малас 2021
Рыбалка на Малас 2021Джексон 79 - 04 авг 2021 18:20
-
 Результаты конкурса с весом щуки
Результаты конкурса с весом щукиАлексей Торопов - 16 янв 2021 06:45
 2
2

Что нам показывает эхолот
06 июн 2015 18:34 |
Chaynic
в Техника, электроника
эхолот статья про эхолоты lowrance про эхолот что нам показывает эхолот алтайский рыболовный клуб Что такое эхолот, что он нам показывает, на чём основаны принципы его работы - наверное каждый задавался таким вопросом. Ответить на этот вопрос может наверное любой физик или человек неплохо в физике разбирающийся. Принцип действия эхолота заложен в само название прибора, эхо - это отражённый звук. Соответственно, что бы заполучить эхограмму,надо - датчик, который этот сам звук сформирует, отправит и примет его отражение, а так же монитор, который это отражение изобразит какими то символами, глядя на которые мы зададим себе вопрос - *а чёй-то это он кажет?*.
Что такое эхолот, что он нам показывает, на чём основаны принципы его работы - наверное каждый задавался таким вопросом. Ответить на этот вопрос может наверное любой физик или человек неплохо в физике разбирающийся. Принцип действия эхолота заложен в само название прибора, эхо - это отражённый звук. Соответственно, что бы заполучить эхограмму,надо - датчик, который этот сам звук сформирует, отправит и примет его отражение, а так же монитор, который это отражение изобразит какими то символами, глядя на которые мы зададим себе вопрос - *а чёй-то это он кажет?*. Примеры использования звука и его отражённого сигнала, есть не только там где присутствует вода, но и гораздо ближе - практически в любой больнице, это УЗИ. Кто делал УЗИ, наверняка обратили внимание, что доктор смазывает место где будет проводить датчиком, обильной смазкой, похожей на вазелин. Делается это для того, что бы между датчиком и поверхностью кожи не было воздуха, который как известно является плохим посредником между посланным и принятым сигналами. Отсюда и правило для размещения датчика эхолота на транце лодки - датчик всегда должен быть в воде. Раз уж я вспомнил про УЗИ, то объясню почему я не советую включать в меню символы рыб. Вы видели (кто был в кабинете где стоит УЗИ) что бы у доктора были включены символы камней в почках, печени или символы детей в утробе? То-то и оно, отсюда ещё один вывод - только реальная эхограмма, без домысливания прибором, способна показать нам правдивую информацию. Как разные доктора, которые видят одно и тоже изображение, но интерпретируют его по-разному, так и мы, видя изображение на экране эхолота, по-разному представляем себе структуру дна, форму бровки и направление залегания коряги, наличие рыб, их вид или количество.
Начнём с датчика. Самые распространённые частоты, на которых работают датчики, у производителей эхолотов - 50, 83, 200 кГц, а в последние годы к ним добавились 455 и 800 кГц. Из курса физики нам известно, что чем ниже частота, тем глубже она проникает, при этом чем выше частота, тем более качественный сигнал мы имеем.
200 кГц,самая распространенная частота для эхолотов. Работает примерно до 300 метров, создает луч шириной до 60 градусов (при условии установки высокого уровня чувствительности) и наиболее чистую и четкую картинку. Сам по себе этот луч узкий для более четкой прорисовки дна, но когда мы увеличиваем параметр чувствительности, он расширяется и, соответственно захватывает больше подводных объектов.
Для поиска рыбы широкий луч это хорошо, для изучения рельефа - плохо. Если луч будет слишком широкий, он будет собирать все подряд вокруг лодки. На экране будет масса дуг , бугров, бровок и т.д., но понять где это все есть или было будет весьма затруднительно. Но это еще не все. Есть еще один нюанс - если широким лучом прибор будет сканировать дно, то начнутся серьезные неточности между показаниями на экране и настоящим рельефом дна. Прибор просто будет усреднять всю информацию(с одной стороны яма, с другой бровка, где-то в стороне ровный стол и всё это надо как-то изобразить).
50кГц - морская частота, максимальная глубина до 1500м. В нашем случае она не нужна.
83кГц - также для пробивания более глубоких мест , с одной стороны, с другой стороны для расширенного обзора, так как луч при включении её расширяется до 120 градусов. Чем это расширение мне не нравится, написал выше.
Спорить о том что мы видим, можно было бы долго, не появись в эхолокации (массовой) новые технологии, которые у разных производителей называются по-разному. Я уже писал что являюсь бессменным пользователем эхолотов компании Lowrance, сначала это были Eagle и Lowrance, а сейчас Simrad, поэтому примеры буду приводить именно с этих приборов. Этим, я ни в коем случае не принижаю многие достойные эхолоты других производителей, таких как Хамминбёрд, Рэймарин, Гармин или Ситекс и Фуруно, у всех этих производителей есть аналогичные технологии, причём действующие очень похоже. Речь пойдёт о технологиях, которые у разных фирм , названы по-разному, но смысл имеющие один и тот-же. У Лоуренс это - DSI, у Хама - DI, у Рэя - Down Vision, у Гармина - DownVü. Все они так или иначе, работают на частотах - 455кГц или 800кГц. В чём прелесть всех этих технологий? Выражаясь простым языком, теперь мы видим что это действительно коряга, можем посчитать количество веточек на стволе, можем увидеть рыбу между веток или между барханов. Более того, мы можем пересчитать всех рыбок в стае. У меня есть несколько записанных эхограмм, где наглядно видна разница между изображениями с разных датчиков или разных частот.
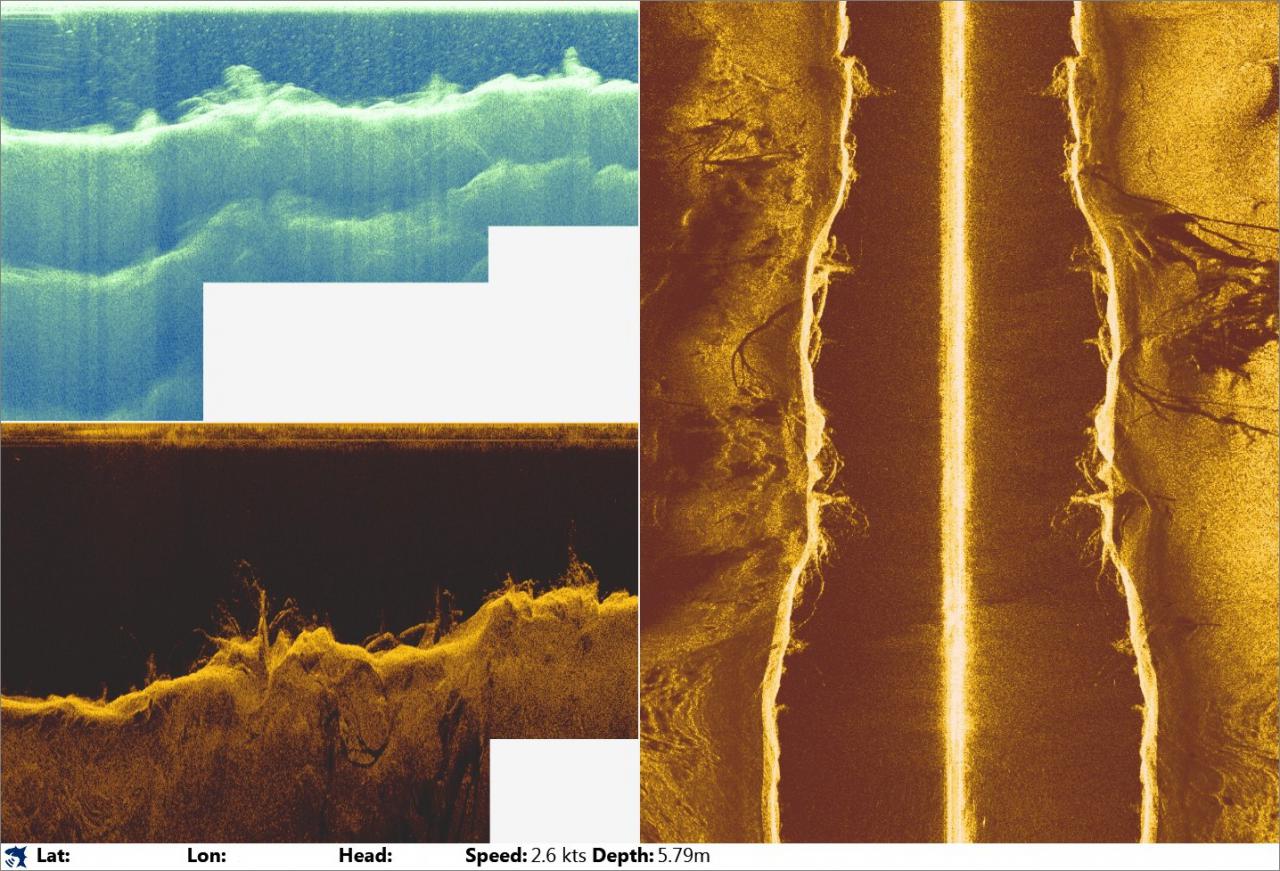
Изображение
в левом верхнем углу взято с датчика 200 кГц, на нём угадывается упавшее дерево на дне и много-много рыб стоящих в-пол воды и у дна. Сразу оговорюсь, такое изображение можно увидеть на экране эхолота достаточно редко, чаще дерево выглядит бесформенным бугром на дне, как на этом фото(левый верхний угол)

а рыбы обрывками дуг или чёрточками. Как отображается рыба эхолотом? В идеале вот так
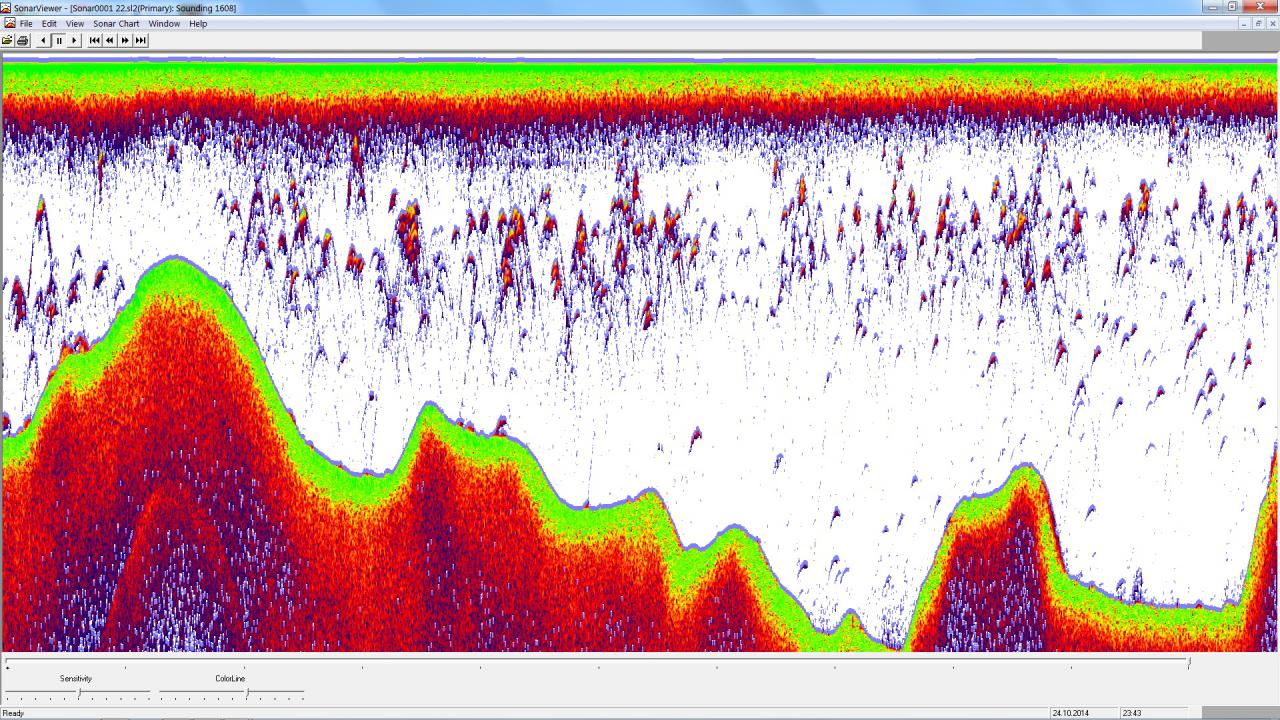
Каких-то точных, особых сигналов он не выдаёт. Рыба, по общим «рекомендуемым» понятиям видна в виде так называемых «дуг». Она образуется при прохождении рыбой через луч эхолота. Но эта дуга образуется только при идеальных условиях, когда рыба сначала попадает в край конуса луча, потом проходит через его центр, и выходит из него, пройдя весь его диаметр. Но так бывает далеко не всегда! Существует десятки разных вариантов нахождения рыбы в луче и тогда эта «дуга» будет отображаться совсем по другому. Идеальная дуга отображается когда рыба стоит на месте, а лодка медленно движется (или наоборот) и луч сканирует тело рыбы по её длине. Но что будет если рыба тоже перемещается по ходу лодки? Тогда она «зависает» в луче на месте и будет отображаться как неподвижный элемент – простой полосой (тоже самое будет если лодка и рыба стоят на месте - не двигаются относительно друг друга). А если она будет быстро плыть против движения лодки? Тогда рыба быстро пересечёт луч и отобразится как коротенькая крутая дуга, которую на большой глубине и рассмотреть-то будет проблематично. То есть - две одинаковые по размеру и форме рыбы при разном направлении или разной скорости перемещения будут отображаться совсем по разному! И те «рекомендации», что типа можно определить по длине дуги, что это щука или лещ - мягко говоря, бред. Хоть как-то определить вид рыбы можно по отражению от плавательного пузыря.

На левой половине экрана хорошо видны крупные особи карповой породы (у них очень крупный пузырь). Сам цвет пузыря при данных настройках имеет зелёно-жёлтый оттенок
Стаи малька могут выглядеть каким-либо бесформенным облаком или пятном.
Это изображение
сформировано в специальной программе, исходная эхограмма была вычищена и настройками яркости, цветности и контрастности доведена до того вида, который мы наблюдаем. А вот левое нижнее изображение это уже и есть новые технологии, о которых написал выше. Деревья ни с чем спутать невозможно, а рыбы показаны точками и чёрточками и это именно рыбы, а не пузыри воздуха или мусор.
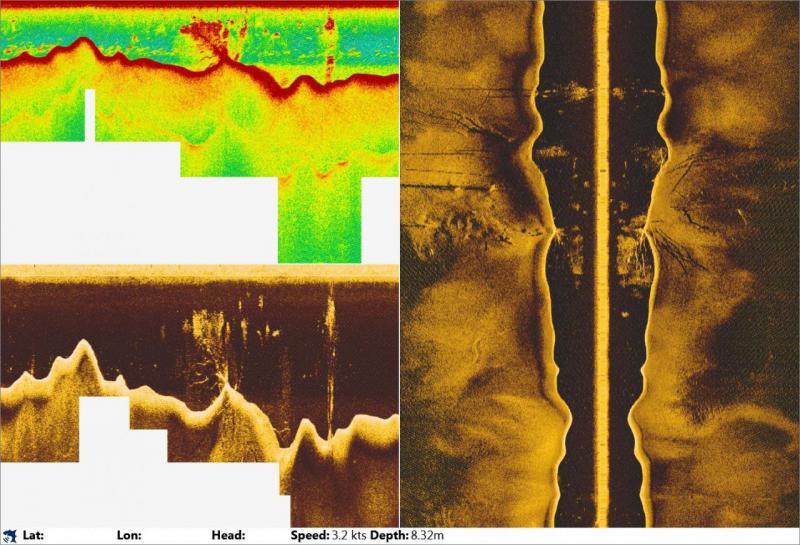
Ещё дальше ушла технология, называемая в народе Структурсканер. Здесь тоже лучи имеющие частоты 455 или 800 кГц, как у систем нижнего сканирования, но они направлены по сторонам, причём длину лучей можно выставлять в меню. Изображение от такого датчика показано на мониторе
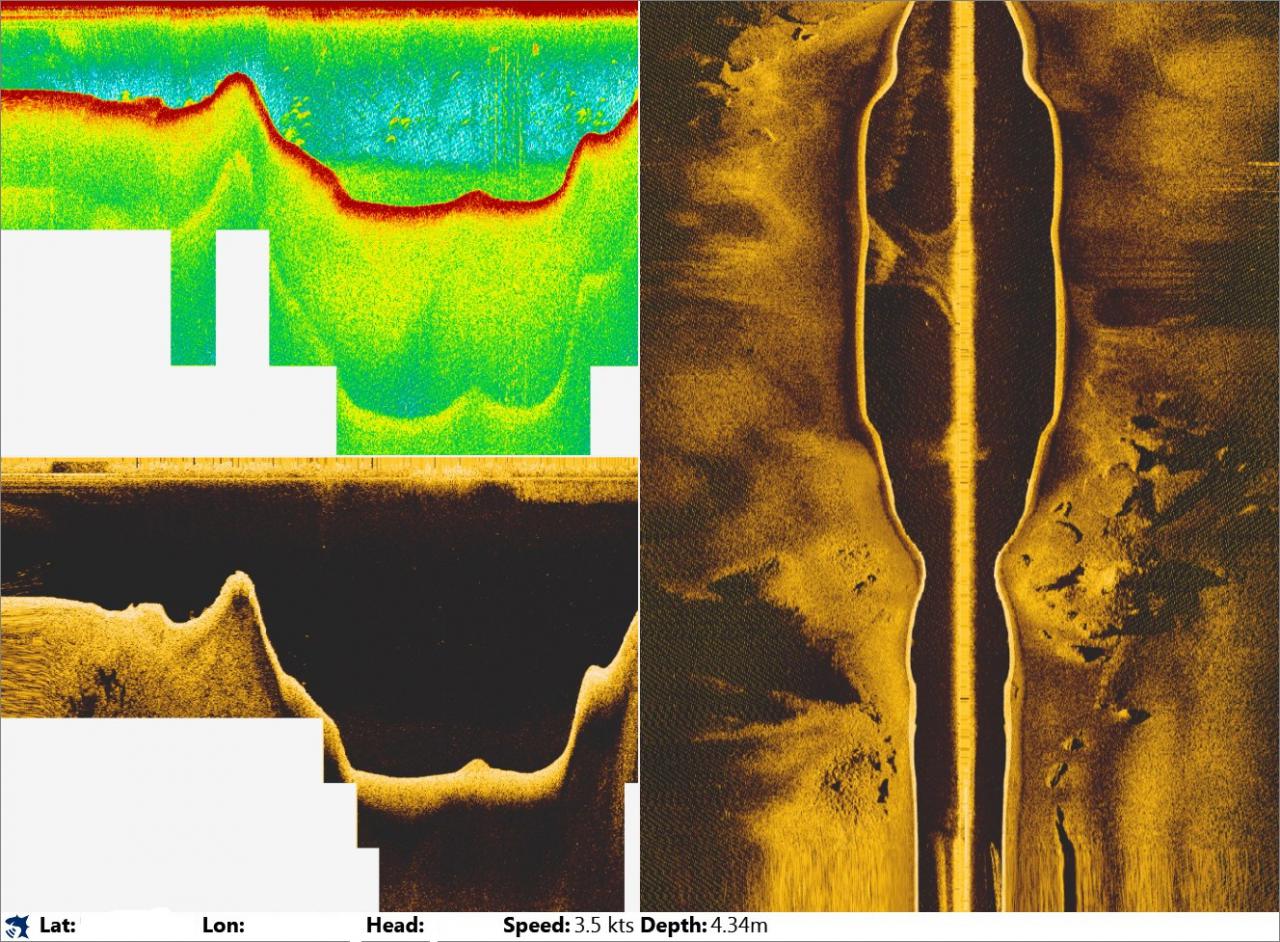 как вид сверху(правое изображение), очень удобно оценивать с какой стороны лежат коряги, куда направлены, направление ям и бровок - всё очень наглядно. Подводные препятствия отбрасывают тени. По длине тени
как вид сверху(правое изображение), очень удобно оценивать с какой стороны лежат коряги, куда направлены, направление ям и бровок - всё очень наглядно. Подводные препятствия отбрасывают тени. По длине тени 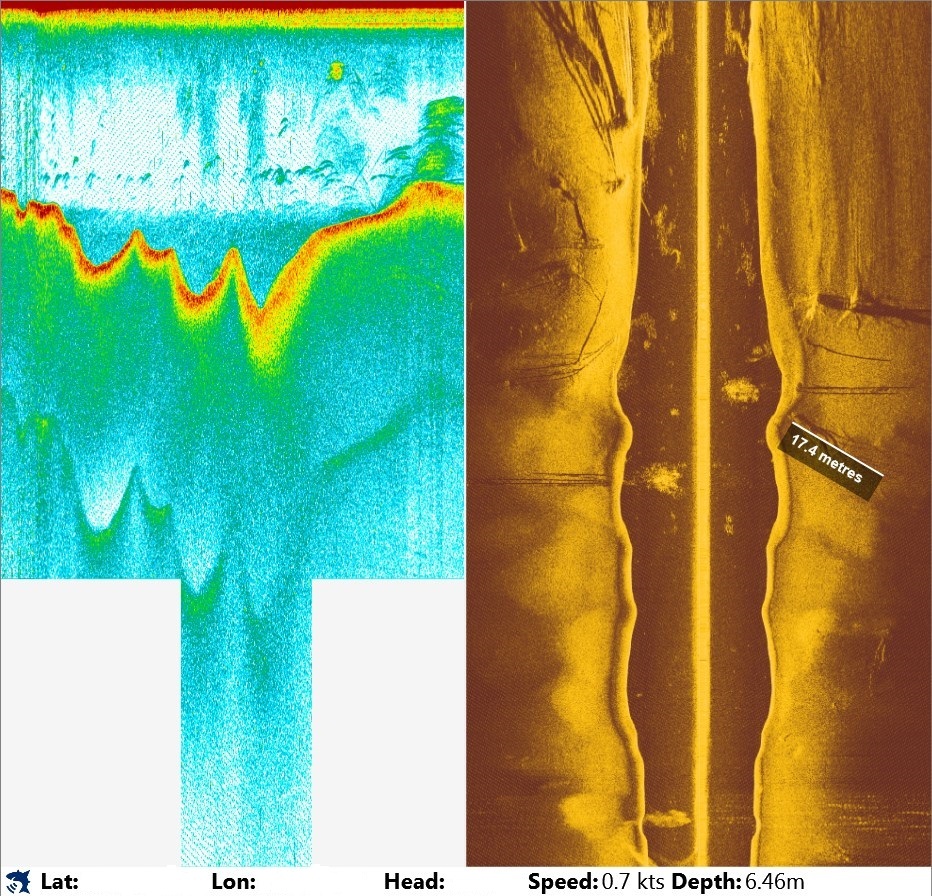
можно определить длину и направление залегания коряги, длину ямы или бровки. Можно даже на дне найти вот такие интересные вещи
 По рассказам очевидцев, именно в этом месте перевернулся Прогресс и затонул, поиск его результатов не дал, так он и лежит до сих пор.
По рассказам очевидцев, именно в этом месте перевернулся Прогресс и затонул, поиск его результатов не дал, так он и лежит до сих пор. Эта статья писалась в течении нескольких дней, поэтому получилась несколько несвязанной, где-то мысль терялась, где-то забывал о чём ещё хотел написать. Поэтому может возникнуть много вопросов по этой теме.
- Nik(дядьКоля), Борисыч, Rey и 15 другим это нравится












0 Комментарии