Что в этом году можно взять в пределах 15 тыр?
Из чёрно-белых - Марк 5х про или DSI, из цветных - Элит 3Х. Это все Лоуренсы.

Ссылка на это сообщение #241")

Дата регистрации:23-Июнь 14
 Отправить ЛС
Отправить ЛСОтправлено 20 Май 2015 - 14:11
Что в этом году можно взять в пределах 15 тыр?
Из чёрно-белых - Марк 5х про или DSI, из цветных - Элит 3Х. Это все Лоуренсы.

Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 21 Май 2015 - 13:21
Здравствуйте, Сергей!
На Ваш счет, какой лучше?
Что-то в наличие есть?
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 21 Май 2015 - 14:03
Здравствуйте, Сергей!
На Ваш счет, какой лучше?
Что-то в наличие есть?
В наличии есть все, по-мне лучше цветной, то есть Элит 3Х, но экран маловат.

Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 21 Май 2015 - 15:16
Сергей, нужен недорогой эхолот, способный на скорости не терять дно. Будет использоваться исключительно как глубиномер, на рыбу смотреть не надо. Что посоветуешь?
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 21 Май 2015 - 15:20
В наличии есть все, по-мне лучше цветной, то есть Элит 3Х, но экран маловат.
Спасибо!
Ценник и адрес можно озвучить?
Держатели датчика есть?
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 21 Май 2015 - 17:27
Сергей, нужен недорогой эхолот, способный на скорости не терять дно. Будет использоваться исключительно как глубиномер, на рыбу смотреть не надо. Что посоветуешь?
Х4
Спасибо!
Ценник и адрес можно озвучить?
Держатели датчика есть?
9450р Калинина 30/7, остался один. Кронштейны есть.
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 21 Май 2015 - 17:46
9450р Калинина 30/7, остался один. Кронштейны есть.
зарезервировать до субботы можно?
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 21 Май 2015 - 17:54
Х4.
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 21 Май 2015 - 18:37
зарезервировать до субботы можно?
Можно, но в субботу вечером вернётся на витрину.
Их же сняли с производства
Старые запасы, на Короленко 4шт.
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 21 Май 2015 - 18:46
Можно, но в субботу вечером вернётся на витрину.
спасибо, буду.

Дата регистрации:09-Ноябрь 14
Отправить ЛСОтправлено 25 Май 2015 - 20:57
Сергей, подскажите на каком уровне должен распологаться датчик эхолота данного типа  Датчик должен полностью быть под водой и находиться ниже уровня днища лодки?
Датчик должен полностью быть под водой и находиться ниже уровня днища лодки?
Мне жалко людей, что рассвет не встречали,
Не ведали прелести дымной ухи,
Навстречу дождю и пурге не шагали
За счастьем рыбацким по тропам глухим...
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 25 Май 2015 - 23:14
Датчик должен полностью быть под водой и находиться ниже уровня днища лодки?
Датчик должен быть в воде и не должен хватать воздух, исходя из этого выбираем заглубление - примерно до провода.
Дата регистрации:09-Ноябрь 14
Отправить ЛСОтправлено 25 Май 2015 - 23:18
Датчик должен быть в воде и не должен хватать воздух, исходя из этого выбираем заглубление - примерно до провода.
Спасибо!
Мне жалко людей, что рассвет не встречали,
Не ведали прелести дымной ухи,
Навстречу дождю и пурге не шагали
За счастьем рыбацким по тропам глухим...
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 30 Май 2015 - 18:57
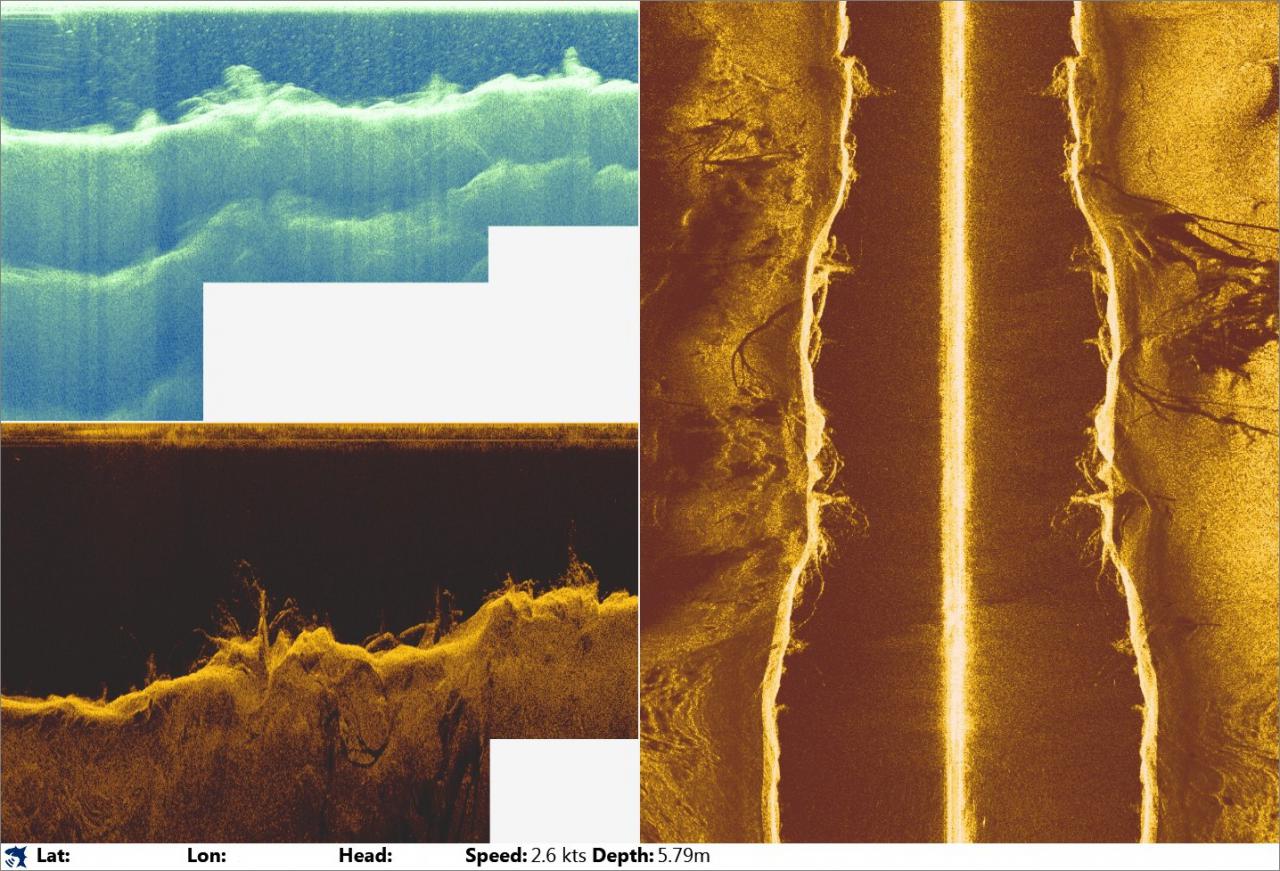
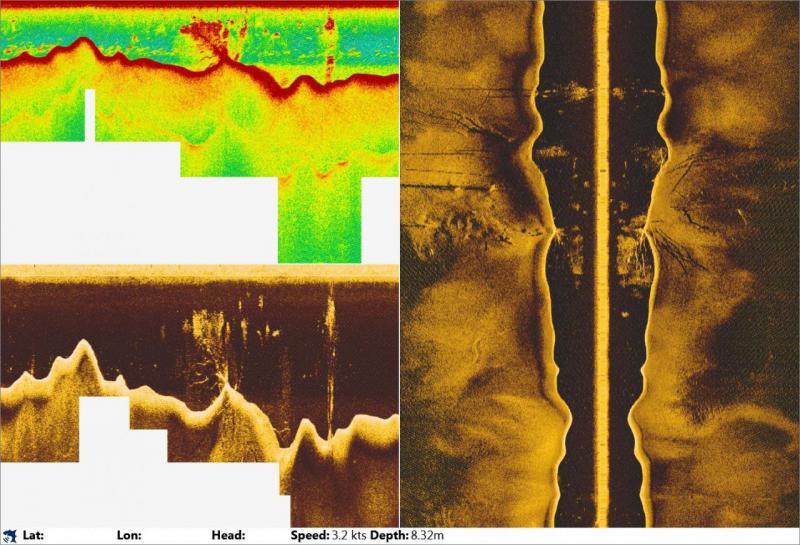


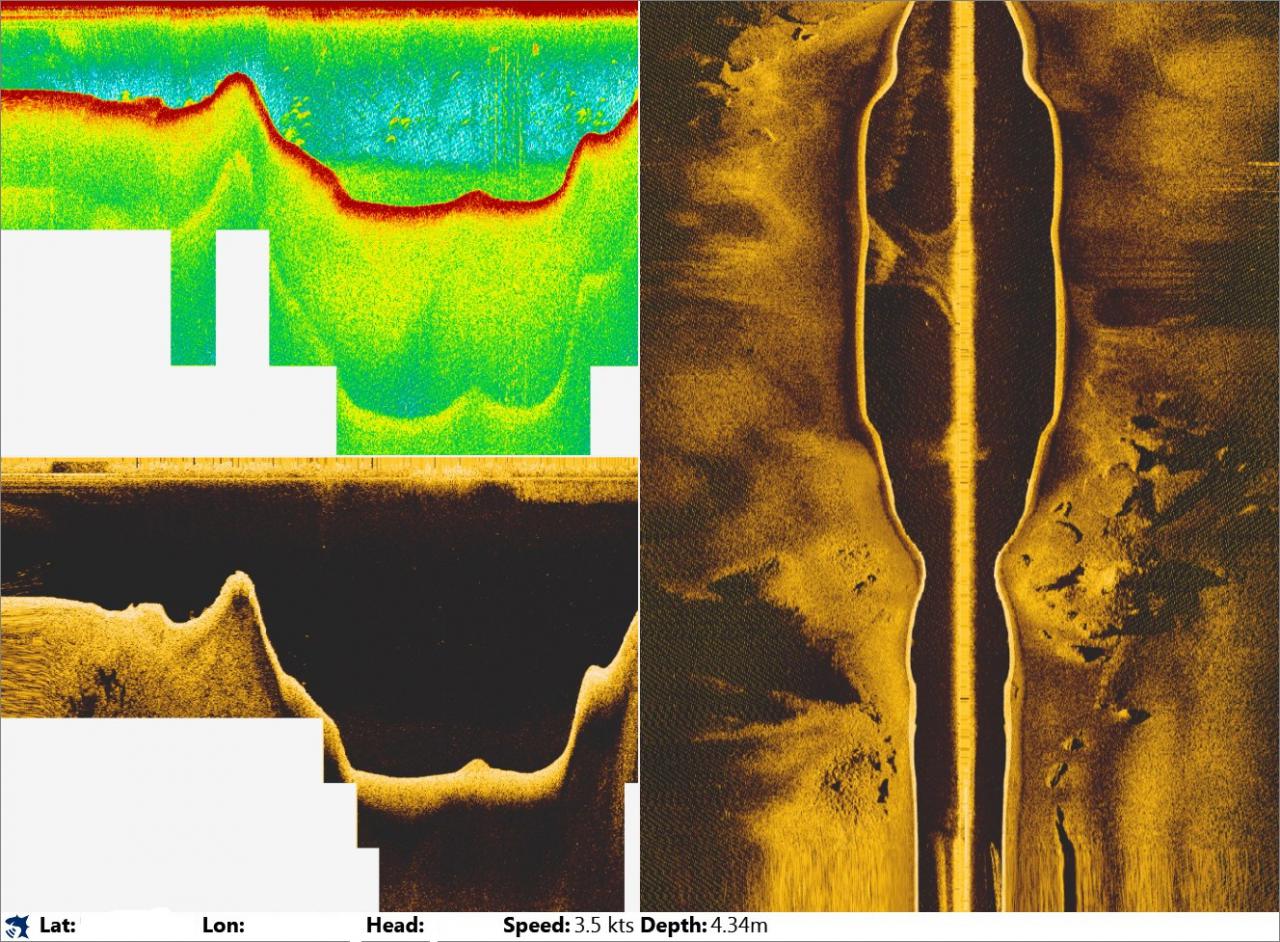 как вид сверху(правое изображение), очень удобно оценивать с какой стороны лежат коряги, куда направлены, направление ям и бровок - всё очень наглядно. Подводные препятствия отбрасывают тени. По длине тени
как вид сверху(правое изображение), очень удобно оценивать с какой стороны лежат коряги, куда направлены, направление ям и бровок - всё очень наглядно. Подводные препятствия отбрасывают тени. По длине тени 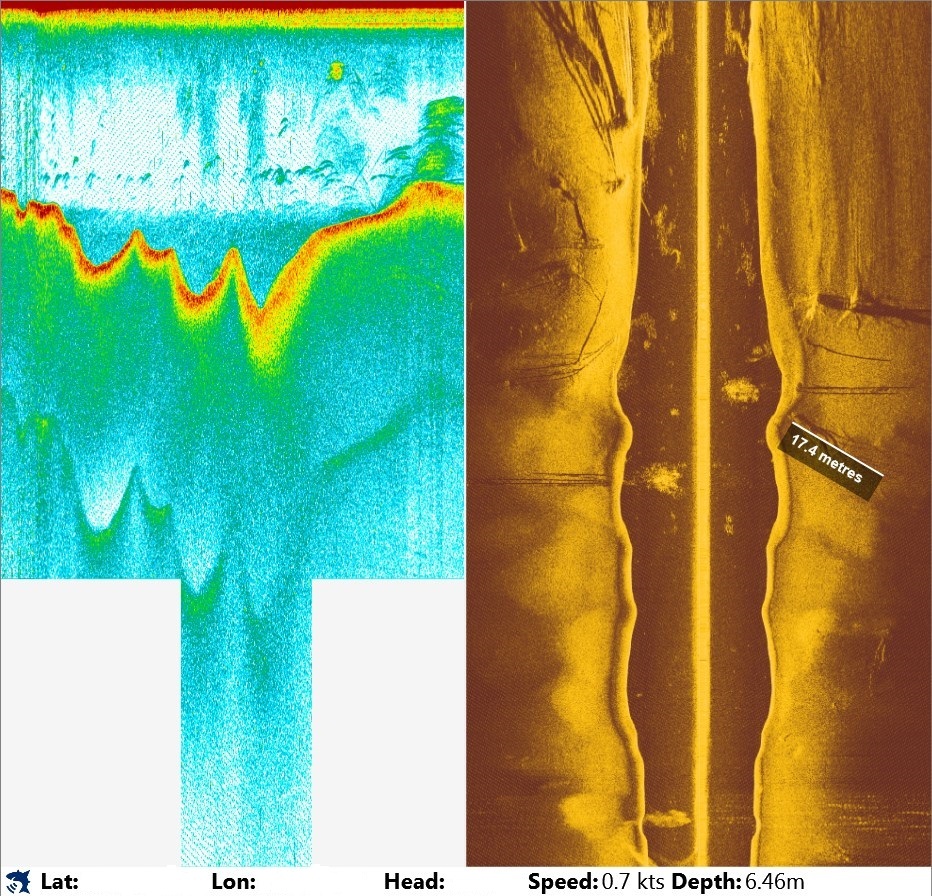
 По рассказам очевидцев, именно в этом месте перевернулся Прогресс и затонул, поиск его результатов не дал, так он и лежит до сих пор.
По рассказам очевидцев, именно в этом месте перевернулся Прогресс и затонул, поиск его результатов не дал, так он и лежит до сих пор. |
Спасибо от 20 Пользователи:
|
, , , , , , , , , , , , , , , , , , ,
|

Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 30 Май 2015 - 22:38
На структурнике какой частотой пользуетесь ?
Ох уж эти сказочки! Ох уж эти сказочники!
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 30 Май 2015 - 22:51
На структурнике какой частотой пользуетесь ?
На коротке, до 15м по сторонам - 800кГц, если дальше то 455кГц.
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 30 Май 2015 - 23:35
Сергей подскажите бюджетную модель эхолота. От сей чудо-машины требуются более или менее точные рельеф дна и глубина.
Каков бюджет?
Дата регистрации:23-Июнь 14
Отправить ЛСОтправлено 30 Май 2015 - 23:50
Во времена кризиса самый скромный))) до 10 т.р
Это не самый скромный, посоветую Лоуренс Элит 3Х.

Дата регистрации:24-Апрель 15
Отправить ЛСОтправлено 31 Май 2015 - 10:16
благодарю
будем думать
Я себе в этом году приобрел 3 X , на воде был пока пару раз с ним, да и то в запрет, так что просто изучал что да как показывает, разбирался со дном и т.д.
Очень хорошая штука!

Дата регистрации:27-Июнь 14
Отправить ЛСОтправлено 31 Май 2015 - 19:47
Это не самый скромный, посоветую Лоуренс Элит 3Х.
А что нибудь в районе 5-6 рублей сейчас можно подобрать?
|
Спасибо от 1 Пользователь:
|
|

0 пользователей, 2 гостей, 0 анонимных









